Robot Power System
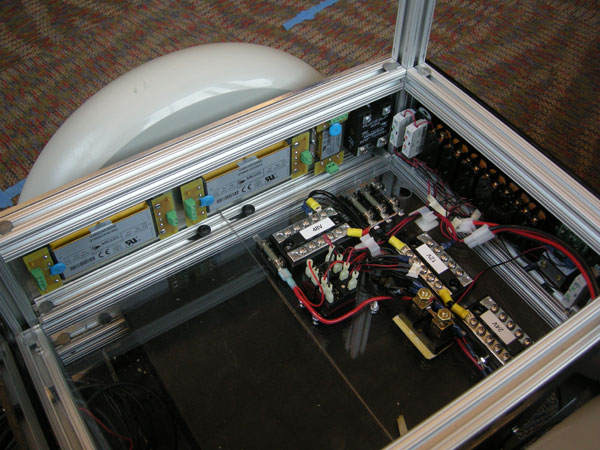
In order to construct Intel Labs Seattle’s mobile robotics platform, MARVIN, I needed to build a power system to supply the DC voltages required by the different components of the system. I used nickel-metal hydride battery packs as the battery power source and VICOR DC-DC converters to provide the various required voltages. The control panel on the rear of the robot is laser-cut acrylic and provides control over battery power, battery chargers, power to individual system components, and battery current and voltage monitoring.
One of the important features of the design is an onboard AC to DC power supply. This allows the robot to run indefinitely from a single tether, which plugs into a standard electrical outlet; no external power supply is needed. The system switches seamlessly between wall and battery power when wall power is connected or disconnected, so no part of the system needs to be shut down to connect or disconnect power. Onboard chargers enable the robot to recharge its batteries while it is plugged in.

Specifications
- Batteries: 2 13000mAh 24V Ni-MH packs in series, for 48V system power
- DC voltage rails: 48/56V (unregulated), 24V 500W, 12V 500W, 5V 100W
- Chargers: 2 onboard 1A Ni-MH chargers
- Wall power supply: 110/220VAC input 56V output 1600W DC power supply, with automatic switchover
- System runtime: 2-3 hours under normal load (arm and hand in motion, laser rangefinder and two PCs running)
- Monitoring: Battery current and voltage meters on the back panel; soon to have computer monitoring of system voltages and currents via this board